xsigno
Camera calibration
Support > Manual
Camera calibration and orientation
The marker codes 1 to 9 are used to identify the orientation board. The segmentation function automatically assigns this markers to a grid named “ORIGIN”. In some cases, for example if the board is too far away or the incident angle too steep, the board markers cannot be found by the auto-segmentation. In that case, the grid has to be manually constructed. You have to assign at least 4 independent markers to form a valid grid. To assign a marker to a grid, you enter the gridname and a index to each marker shape. Once 4 markers are assigned, the grid will be drawn as a overlay in the main area.
For orienting the camera, the grating pitch of the grid must be set up properly. Select the grid drawing with the right mouse button and open the edit dialog from the context menu. The important input parameters are the name, size and the pitch given in mm. For the orientation board, the grid has a size of 11x11 points indexed from -5 to +5. The distance between two points is 32nm to the x-direction and 24mm to the y-direction.
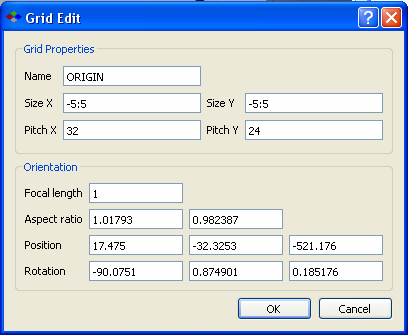
Grid property dialog.
Once the grid is setup, the grid can be used to estimate the camera orientation and the distortion coefficient. Open the context menu of the grid drawing and select “Calibration”. The calibration dialog offers several regression criteria “Orientation”, “Distortion”, “Distortion extended”. From these three methods, the first method estimates the position and rotation of the camera using the current distortion value as fixed value. The distortion setting estimates orientation and the distortion coefficient. The last method “Distortion extended” additionally adjusts the center of the radial distortion. In most cases, the “Distortion” method should be the method of choice. In some cases however, this method fails and results in nonsense parameters. In that case, it “Orientation” method gives more stable results as you can choose a proper distortion coefficient.
The calibration function is a regression problem minimizing the error between the measured grid markers and the ideal reference. The error value can be measured as pixel error or as distance error in mm. In most cases the results are almost the same, so it does not really matter which Objective function to use.
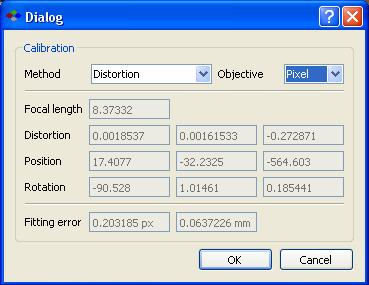
Calibration dialog.
Sub-Menu: